
Robot qui dit bonjour
Dans cette activité les makers créent un petit robot qui bouge le bras quand on passe près de lui avec un moteur pas à pas et un capteur de distance.

Objectifs pédagogiques
Compétences techniques
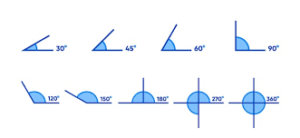
- Se familiariser avec la notion de mesure d’angle
- Découvrir le fonctionnement d’un moteur pas à pas
- Réutiliser les notions vues sur l’utilisation d’un capteur de distance
Compétences design
- Créer un robot en carton
Compétences projet
- Personnaliser son projets en réutilisant toutes les notions vues jusque là.
La place dans le module
Cette activité vient après l’instrument de musique électronique et avant la boussole
Jour 1
Jour 2
Jour 3
Jour 4
Jour 5
1h
🤩
30 min
🤩
30 min
🤩
1h
🤩
Matériel
- Microbits + shield grove + Capteurs ultrason + cables Grove-Grove et Grove-mâle+ moteur pas à pas
- Papier et crayons, scotch, carton
Déroulé de l'activité
Segmentation de l’activité
- Segment 1 (1h) : Comprendre et utiliser un moteur pas à pas
- Segment 2 (30 min) : Code de base
- Segment 3 (30 min) : Craft du robot
- Segment 4 (1h) : Personnalisation
Détail de l’activité
Segment 1 (1h) : Comprendre et utiliser un moteur pas à pas
Intro et brainstorm sur les angles (20 min)
Commence à présenter aux makers le projet. Dis leur que nous allons utiliser un moteur pour animer un bras avec un capteur de distance.
Demande aux makers s’ils savent qu’est ce que c’est qu’un angle et comment on peut les mesurer?
Indique leur qu’un tour complet correspond à 360°, un demi tour 180°, un quart de tour 90°, 45° etc. Dessine un cercle au tableau et note les angles au fur et à mesure tout en demandant aux makers où ils placent tel ou tel angle et indique les au tableau. C’est pas grave si tu n’es pas très précis, nous utiliserons surtout les angles entre 0 et 180° donc interroge les surtout sur cette partie du cercle
Jacques à dit (10 min)
Brainstorm qu’est ce qu’un moteur (10 min)
C’est maintenant le moment de s’intéresser au fonctionnement d’un moteur. Demande aux makers s’ils savent ce que c’est un moteur et à quoi ça sert.
C’est un composant électronique qui permet de faire tourner quelque chose. On peut imaginer la force d’une roue à eau pour alimenter des mécanismes et faire tourner quelque-chose, le moteur c’est pareil il va faire tourner quelque-chose comme par exemple la roue d’une voiture, l’hélice d’un hélicoptère, un manége. Tu peux leur demander s’ils ont des idées de choses qui tournent avec un moteur.
Notre moteur à un fonctionnement un peu particulier, il ne fait pas des tours complets, mais il s’oriente dans une direction choisie. Pour cela, nous allons utiliser un angle.
Moteur : branchement et code de base (20 min)
Montre aux makers comment brancher le moteur et comment clipser un axe en plastique pour bien visualiser le mouvement. Puis fais une démo active sur ou trouver les blocs pour le moteur et faire des mouvements, entre deux positions. N’hésite pas à faire un code sans pause au milieu pour qu’on voit que ça ne marche pas bien et demande leur comment ajouter un temps de pause entre deux mouvements.
Les makers reproduisent le code et s’approprient les déplacements du moteur.
Segment 2 (30 min) : Ajout du capteur de distance et animation de la bouche
Capteur du distance (20 min)
Les makers branchent un capteur de distance et codent le déclenchement du mouvement quand une présence est détectée
Animation de la bouche (10 min) – Bonus
Les makers créent l’affichage de la bouche du robot et éventuellement son animation avec l’écran Led du microbit.
Segment 3 (30 min) : Conception et craft
Conception (10 min)
Si les makers ont finis leur code ils peuvent dessiner la forme de leur robot sur du carton et le décorer.
Pense à leur dire de mesurer la taille du capteur de distance pour les yeux et l’écran led du microbit pour la bouche
Création du robot (20 min)
Les makers découpent la forme de leur robot, leur socle et leur bras puis fixent tout ça avec du scotch.
Assure toi qu’ils fixent le bras sur un des axes en plastique qui se clipse sur le moteur de manière à ce que le bras soit mobile.
Segment 4 (1h) Test, débug et personnalisation
Branchement des composants et test (10 min)
Les makers branchent tous les composants et téléchargent le code sur leur microbit, puis ils testent si cela fonctionne bien
Debug et paramétrage (10 min)
Les makers modifie les angles de rotation du moteur pour que le mouvement du bras corresponde à leurs envies, que la distance de détection soit la bonne et règlent les problèmes de branchements ou de codes éventuels
Personnalisation (30 min)
Les makers peuvent modifier et personnaliser leur robot en ajoutant de la musique, des mouvements plus complexes ou encore un nouveau membre à leur robot (bras, queue, chapeau ….)
Tips
Tips truc
machin bidule
Tips truc
machin bidule