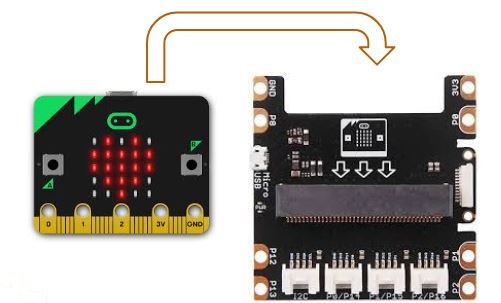
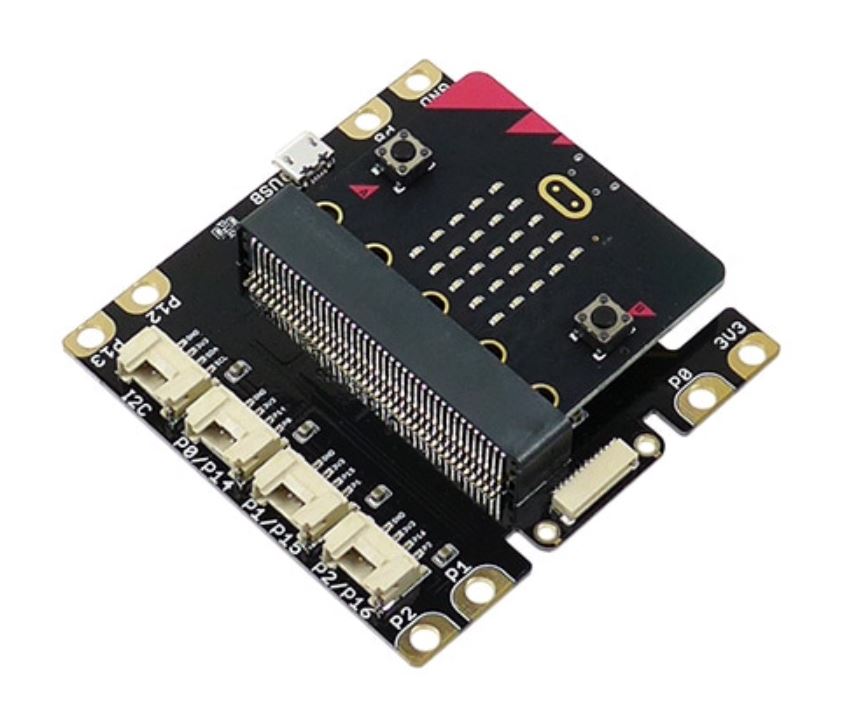
Le shield est une carte qui se connecte au Microbit pour ajouter plus de fonctionnalités. Il a des ports où on peut brancher différents composants. En premier lieu insert ton Microbit dans le Shield.
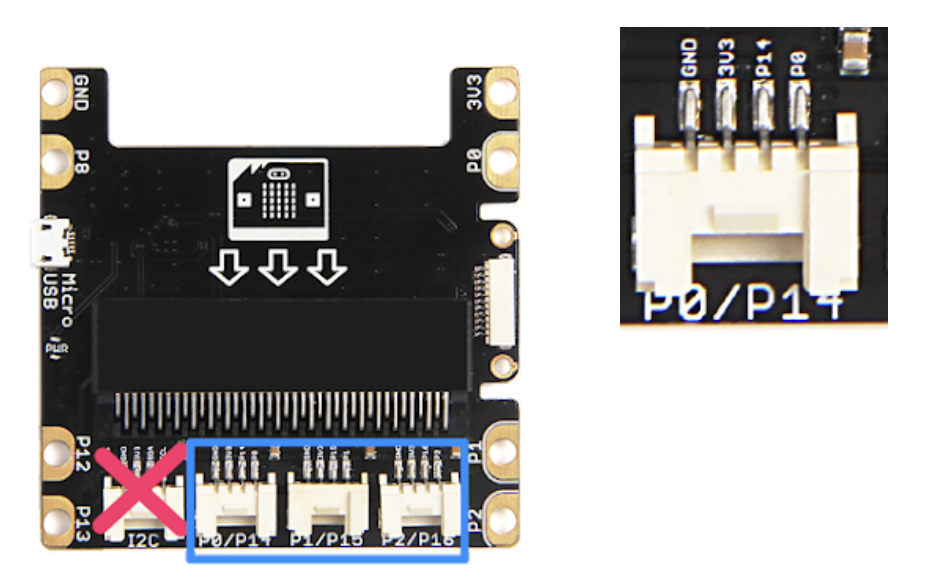
Pour brancher tes composants, tu peux utiliser les 3 ports entourés en bleu (P0/P14, P1/P15, P2/P16). Pour chaque port, tu as en réalité deux entrées/sorties ! Elles sont écrites en petit à côté du port.
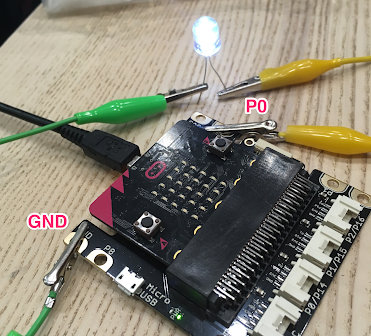
Tu peux utiliser des pinces crocodiles avec les autres ports sur les côtés de la carte (GND, P8, P12, P13, 3V3, P0, P1, P2).
On ne va pas utiliser le port I2C.
Les Boutons
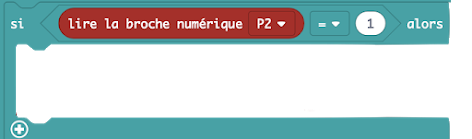
Les boutons sont comme les touches d’une télécommande. Quand tu appuies dessus, cela envoie un signal de type Entrée Numérique au Microbit, indiquant qu’une action doit être prise.
Qu’est-ce qu’une Entrée Numérique ?
Une information numérique binaire est une donnée qui peut seulement avoir deux états : 0 ou 1. C’est comme un interrupteur qui peut être soit allumé (1) soit éteint (0).
Bouton sur le Microbit :
Pressé (1) : Quand tu presses le bouton, le Microbit reçoit un signal de 1. C’est comme dire « oui » ou « vrai ».
Non Pressé (0) : Quand le bouton n’est pas pressé, le Microbit reçoit un signal de 0. C’est comme dire « non » ou « faux ».
Comment connecter le Bouton au Shield ?
Lorsque tu connectes le bouton poussoir avec le Shield, regarde bien le bouton. Tu en auras généralement deux types.
Soit un modèle comme celui-là avec son câble à relier au Shield :
Attention : Pour déconnecter le câble du Shield, ne tire pas sur le câble ! Appuie sur le petit blanc loquet qui est dessus.
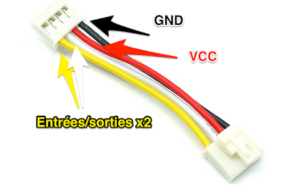
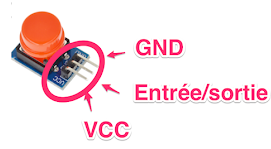
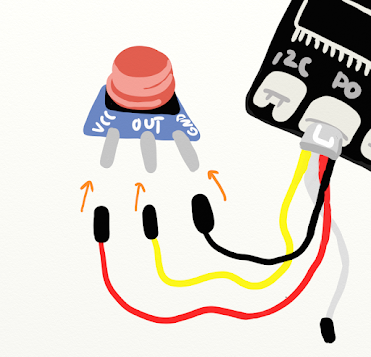
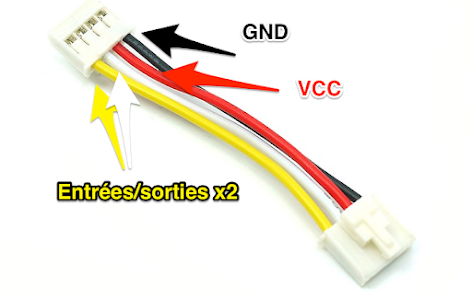
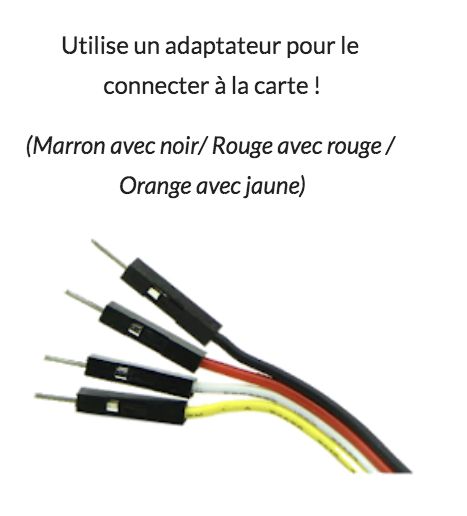
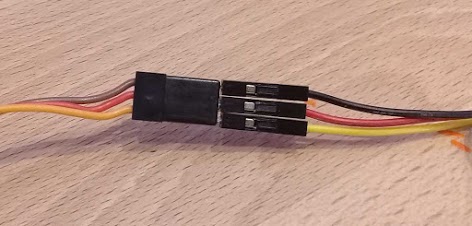
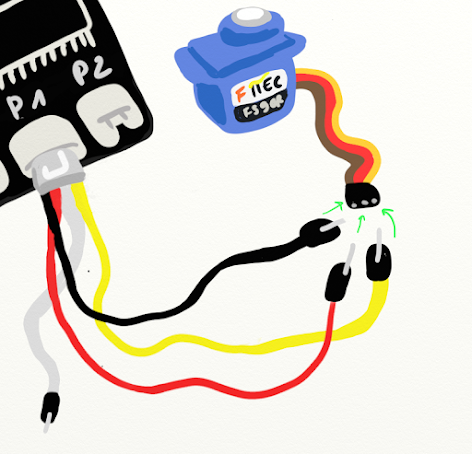
Soit un modèle comme celui-là. et tu auras besoin d’un câble femelle.(jaune/blanc = OUT / rouge = VCC / noir = GND)
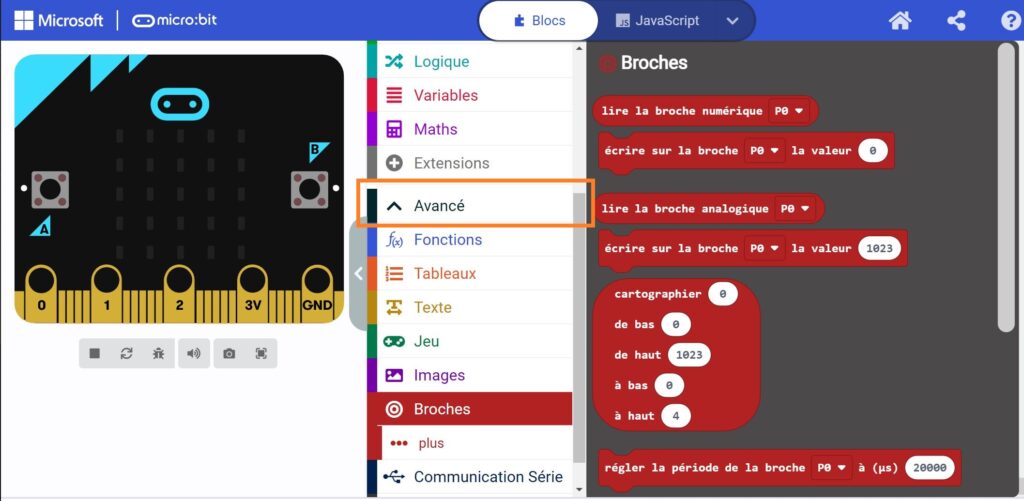
Les Blocs dans MakeCode ?
Pour accéder au Blocs des Broches tu vas devoir cliquer sur AVANCEE
Le Potentiomètre & Capteur à Distance
Un potentiomètre est un bouton que tu tournes. En le tournant, tu changes la résistance, ce qui modifie la valeur lue par l’Entrée Analogique. La valeur peut varier de 0 à un maximum (par exemple, 1023 sur le Microbit).
Qu’est-ce qu’une Entrée Analogique ?
Une entrée analogique est un type d’entrée sur un appareil électronique qui peut lire une gamme continue de valeurs, plutôt que seulement deux états comme pour les entrées numériques (bouton). Cela permet de mesurer des variations plus subtiles et continues.
Comparaison entre une Entrée Numérique & Analogique :
Entrée Numérique (bouton) : Ne peut lire que 0 ou 1 (éteint ou allumé).
Entrée Analogique (potentiomètre) : Peut lire une gamme de valeurs continues (comme les volumes intermédiaires d’un bouton de volume).
Comment connecter le Potentiomètre au Shield ?
Tu peux brancher un potentiomètre avec un câble Grove classique ! Tu as juste à le clipser à la broche P que tu souhaites !
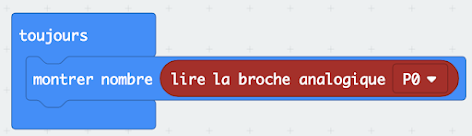
Les Blocs dans MakeCode ?
Capteur de distance
Un capteur de distance (ultrasons) envoie un signal, puis mesure le temps que le signal met à revenir. Plus le temps est long plus la distance est grande. C’est lui aussi une Entrée Analogique
L’envoi du signal correspond à la broche ECHO (le capteur émet un “echo”), la broche TRIG déclenche la mesure, elle correspond à l’arrivée du signal.
Plage de mesure : de 2cm à 4 m !
Pour utiliser le bloc ‘Ultrasonic Sensor’, il faut d’abord importer l’extension ‘Grove’ ! Il faut écrire le nom de l’extension pour la trouver !
/!\ Astuce/!\ :
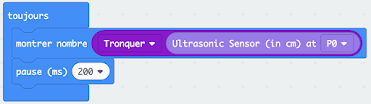
Pour comprendre comment le capteur fonctionne, commence par afficher ses valeurs comme suit :
Le bloc ‘tronquer’ permet de ne garder que le nombre entier et ne pas afficher les décimales ! Tu trouveras ce bloc dans la catégorie ‘Maths’.
On marque aussi une pause pour pouvoir lire plus facilement les valeurs !
Le capteur de distance & ses branchements
Tu peux brancher un capteur de distance Grove avec un câble Grove classique ! Tu as juste à le clipser à la broche P que tu souhaites !
Un servomoteur est un petit moteur contrôlable par le Microbit. Il peut tourner à un angle précis ou tourner en continu. Ils utilisent des sorties numériques pour fonctionner.
Qu’est-ce qu’une Sortie Numérique et PWM ?
Pour contrôler un servomoteur, le Microbit envoie des signaux numériques, utilisant une méthode appelée PWM (Pulse Width Modulation). Voici ce que cela signifie simplement :
Sortie Numérique : Elle peut être soit allumée (1), soit éteinte (0).
PWM : C’est comme allumer et éteindre très rapidement pour créer différents effets. La durée pendant laquelle c’est allumé ou éteint contrôle le mouvement du servomoteur.