Un servo moteur pas à pas est un petit moteur que l’on peut commander via une impulsion électrique pour l’orienter dans une certaine direction. Il peut se déplacer sur un demi tour, c’est à dire 180°. Il suffit d’indiquer l’angle que l’on souhaite entre 0 et 180 et le moteur va tourner dans cette direction là.
Utiliser les blocs servo moteur
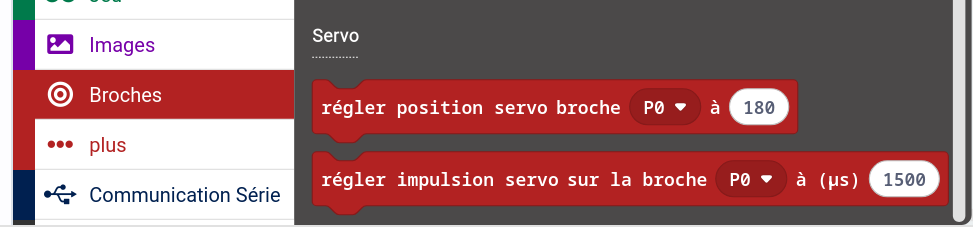
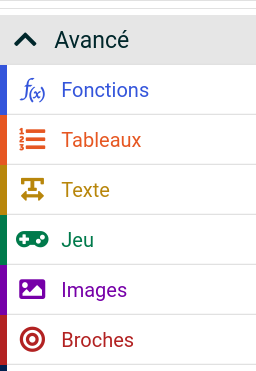
Pour utiliser les servos moteurs, nous allons utiliser les blocs Servo. Pas besoin d’installer d’extension, regarde les blocs Avancé puis dans Broches, tout en bas tu trouvera les blocs suivants
Brancher le servo moteur
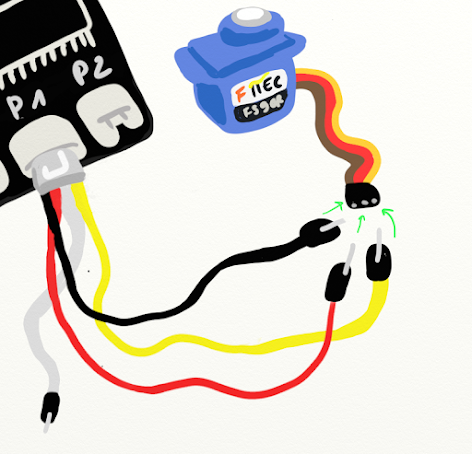
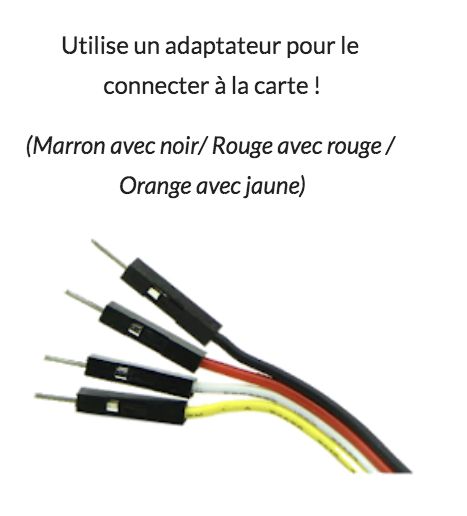
Pour connecter le moteur au microbit, tu as besoin d’un câble Grove mâle pour le brancher sur le shield grove :
le fil noir avec le fil marron
le fil rouge avec le rouge
le fil jaune avec le orange
Code du robot
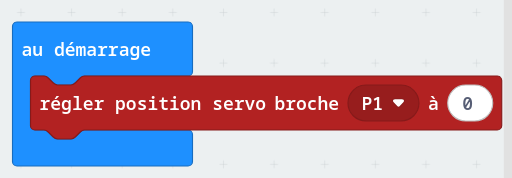
Initialise la position du moteur
Au démarrage, il est important que tu positionnes le moteur à l’angle souhaité sinon on ne sait pas ou il se promènera, utilise une petite pièce en plastique pour bien indiquer la position au repos.
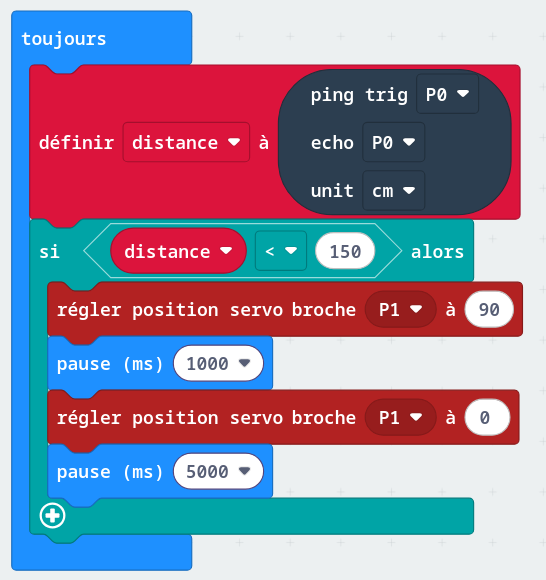
Détecte la distance et bouge le bras
Ensuite, on va mesurer la distance avec le microbit. Si le capteur détecte quelque-chose à une distance choisie, tu vas pouvoir faire bouger le moteur, attendre un peu et remettre le moteru à la position initiale.
Pour la distance choisie la distance qui te semble intéressante.
Laisse vraiement un peu de temps entre chaque mouvement du moteur pour qu’il ait le temps d’aller à la position choisie
Tu peux mettre autant de mouvement que tu veux mais fais le plutôt après avoir construit le robot en carton pour bien voir ce à quoi ça ressemble.
Attention, sur certains moteur, atteindre le 0 et le 180 peut être difficile (le moteur tremble) dans ce cas préfére aller sur des valeurs entre 20 et 160.
Craft
Création du robot
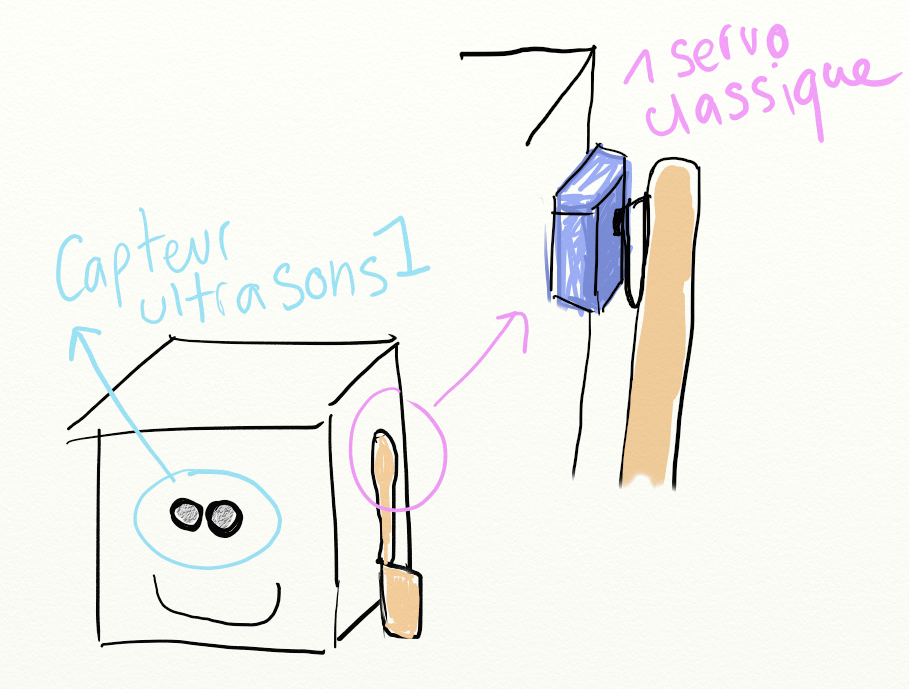
Commence par dessiner la face avant de ton robot:
laisse un espace pour mettre le capteur de distance pour faire les yeux
laisse un espace pour voir l’écran led et pouvoir dessiner une bouche.
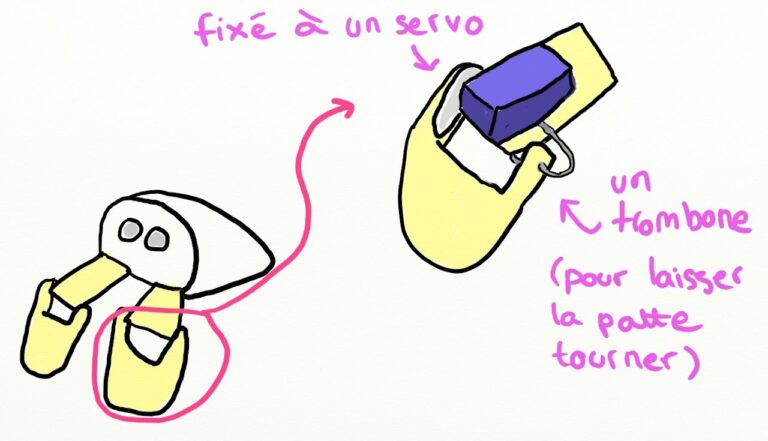
Sur le coté tu vas utiliser les pièces en plastique pour fixer un bras en carton sur le servo moteur pour qu’il puisse tourner.
Fixe aussi lemoteur sur le coté du robot.
Pour faire tenir debout ton robot, tu peux fabriquer un socle ou une boite pour cacher l’électronique à l’interieur
Quelques conseils :
Attention, vérifie bien la position du bras de ton robot et l’orientation de la petite partie en plastique avant de fixer le bras dessus pour qu’il soit au bon endroit.
Une fois le robot fini, tu devra peut être ajuster l’angle du moteur pour que le bras fasse bien les mouvements souhaités. Avec le poids du bras il peut avoir un peu plus de mal à aller à l’angle souhaité, donc ne fais pas un bras trop lourd !
Pas à pas du craft du robot:
On commence par le design du robot et le placement des composants :
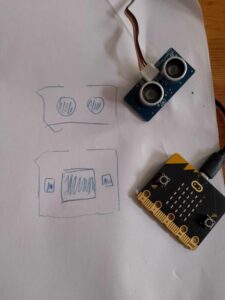
Étape 1 :
Dessine tes composants sur une feuille pour voir la place qu’ils font prendre
Étape 2 :
Découpe l’espace pour les composants visibles et sur la face du robot pour t’assurer que les trous sont à la bonne taille.
Étape 3 :
Décore est dessine ton robot
Étape 4 :
Fixe les composants sur ton robot.
Tu peux coller un carton sur ton robot et redécouper les trous pour avoir une structure plus rigide. (Ce n’est pas le cas sur l’exemple en photo et tu verras que le robot est un peu déformé par la fixation des composants)
Puis on va assembler le robot avec du carton pour qu’il tienne debout
Étape 5:
Assure toi que la face du robot soit bien solide et ajoute des renforts en carton si besoin et fixe le moteur si tu ne l’as pas encore fait.
Pense à mettre aussi un petit pieds en bas pour qu’il puisse tenir un peu debout
Étape 6 :
Tu peux faire des supports en forme de demi boite pour aider à le stabiliser ou faire complétement une boite. Puis vérifie qu’il tienne bien debout.
Astuce : tu peux pencher un peu le robot vers l’arrière pour qu’il soit plus stable
Enfin on va dessiner, découper et fixer le bras du robot
Fixe le support en plastique sur le bras et clipse le bras sur le moteur.
Astuce : Fais bien attention à la position du moteur avant de lancer le code. Tu peux le prendre dans tes mains lors du premier test pour éviter de tout casser. Et pense à calibrer l’amplitude du mouvement pour que le geste corresponde à tes envies
Personnalise ton robot
Anime la bouche
Tu peux utiliser les leds pour dessiner la bouche du robot quand on detecte une présence
Joue de la musique
Le robot peut aussi jouer de la musique quand il détecte quelqu’un
Ajoute un deuxième bras
Si tu as un deuxième moteur, tu peux en profiter pour ajouter un deuxième bras, une queue, un chapeau qui se lève ou plein d’autres choses à ton robot. A toi de trouver les idées.
Tu peux même utiliser plusieurs morceaux de cartons pour faire des bras un peu articulés
Créé plusieurs animations selon la distance
Tu peux choisir que le robot se réveille quand tu es à 1 mètre et fasses autre chose si tu es plus prêt, voir trop prêt.